Лекция восьмая. Бифуркации
Исследование качественных математических моделей сопровождается возникновением качественных вопросов, можно разделить на две категории:
- Вопросы, относящиеся к поведению системы при фиксированных значениях параметров; важным при этом является качественное понимание характера режимов, устанавливаемых в системе;
- Вопросы, касающиеся событий, которые происходят в системе при изменении значений параметров. Медленное изменение параметра может привести к тому, что при пересечении некоторого критического значения режим, установившийся в системе, приобретает качественные изменения. При таких перестройках фазовый портрет изучаемой системы, изменяется. Качественные перестройки фазового портрета называются бифуркация .
Задачи теории бифуркаций
Решением вопросов данного типа занимается теория бифуркации, задачами которой являются:- описание всех возможных бифуркации исследуемой системы;
- разбиение множества бифуркационных значений параметров на области с разными типами грубых фазовых портретов;
- построение для каждой области соответствующего фазового портрета.
 Рисунок 1 - Поведение исследуемой системы в случае r<0
Первая точка (слева) устойчива, так как из рис. 1 видно, что функция меняет свой знак с «+» на «-».
Вторая точка - неустойчива, так как из рис. 1 видно, что функция меняет свой знак с «-» на «+».
Рисунок 1 - Поведение исследуемой системы в случае r<0
Первая точка (слева) устойчива, так как из рис. 1 видно, что функция меняет свой знак с «+» на «-».
Вторая точка - неустойчива, так как из рис. 1 видно, что функция меняет свой знак с «-» на «+».
- При r = 0 уравнение (*) имеет один корень. В этой точке, следовательно мы не можем аналитически определить тип устойчивости. Фазовый график представлен на рис. 2.
 Рисунок 2 - Поведение исследуемой системы в случае r = 0
Из анализа графика рис. 2 можно установить, что функция f(x)
при переходе через особую точку не меняет знак, следовательно эта точка является неустойчивой.
Рисунок 2 - Поведение исследуемой системы в случае r = 0
Из анализа графика рис. 2 можно установить, что функция f(x)
при переходе через особую точку не меняет знак, следовательно эта точка является неустойчивой.
- При r > 0 точек равновесия нету:
 Рисунок 3 - Поведение исследуемой системы в случае r > 0
Итак, полустойкие точка равновесия исчезает, как только становится положительным. Так как характеристики точек равновесия меняются со временем, говорят, что динамическая система имеет бифуркацию. В данном случае значение параметра меняются от отрицательных через ноль к положительным и характеристики стационарных точек изменяются так, как показано на рис. 1-3. Следовательно, в точке происходит бифуркация.
Рисунок 3 - Поведение исследуемой системы в случае r > 0
Итак, полустойкие точка равновесия исчезает, как только становится положительным. Так как характеристики точек равновесия меняются со временем, говорят, что динамическая система имеет бифуркацию. В данном случае значение параметра меняются от отрицательных через ноль к положительным и характеристики стационарных точек изменяются так, как показано на рис. 1-3. Следовательно, в точке происходит бифуркация.
Точка бифуркации
Точка бифуркации - это такое состояние системы, при котором даже незначительное возмущение может привести к глобальным изменениям. Аналогично выражения «взмах крыла бабочки привел к урагану в Калифорнии». Рыцарь на распутье - это , космический аппарат, летящий между Землей и Луной и не имеющий необходимой скорости, чтобы выйти из гравитационного поля одной или другой планеты - точка бифуркации. Станет он спутником Земли или Луны, зависит от микроскопических возмущений типа солнечного ветра или микрометеоритов. На фондовом и валютном рынках уровни поддержки или сопротивления являются точками бифуркации. Ценные бумаги или валюта, достигнув их, или сорвутся вниз, либо пойдут вверх и это зависит от очень незначительных факторов. Август 1991 г. - точка бифуркации для СССР. Точи бифуркации часто встречаются в потоках газов и жидкости. Поэтому так трудно предсказать погодные условия. Предсказание погодных условий при помощи точек бифуркации.
Термин «бифуркация» буквально означает «раздвоение», но применяется в более широком смысле для обозначения всех возможных качественных перестроек некоторого объекта при изменении параметра, от которого он зависит. Существуют разные .
В примере для функции
значение параметра ε = 0 соответствует точке бифуркации, так как при переходе ε от отрицательных значений к положительным стационарное состояние х=0
стало неустойчивым и дополнилось парой устойчивых состояний -
при отрицательных значениях ε стационарные состояния вообще отсутствуют, а в точке ε = 0 происходит рождение таких состояний, один из которых устойчив, а другой - неустойчивый. В обоих случаях значения ε = 0 соответствуют точкам бифуркации, хотя и разных типов.
Проблемой исследования точек бифуркации является их классификация и анализ поведения семейств функций вблизи структурно неустойчивых особых точек.
Предсказание погодных условий при помощи точек бифуркации.
Термин «бифуркация» буквально означает «раздвоение», но применяется в более широком смысле для обозначения всех возможных качественных перестроек некоторого объекта при изменении параметра, от которого он зависит. Существуют разные .
В примере для функции
значение параметра ε = 0 соответствует точке бифуркации, так как при переходе ε от отрицательных значений к положительным стационарное состояние х=0
стало неустойчивым и дополнилось парой устойчивых состояний -
при отрицательных значениях ε стационарные состояния вообще отсутствуют, а в точке ε = 0 происходит рождение таких состояний, один из которых устойчив, а другой - неустойчивый. В обоих случаях значения ε = 0 соответствуют точкам бифуркации, хотя и разных типов.
Проблемой исследования точек бифуркации является их классификация и анализ поведения семейств функций вблизи структурно неустойчивых особых точек.
И средневековый латинский furcatus - раздвоенный, от латинского furca - двузубые вилы), разветвление, раздвоение. В теории колебаний и теории динамических систем бифуркация - это перестройка характера движения реальной системы (физической, химической, биологической), переход её в новое качественное состояние при малом плавном изменении одного или нескольких параметров. Значения параметров, при которых наблюдается бифуркация, называются бифуркационными. Математически бифуркация - это изменение структуры разбиения фазового пространства динамической системы на траектории при малом изменении её параметров.
Теория бифуркации даёт возможность понять как физические явления в механике (поведение частицы в потенциальной яме), оптике (условие возникновения лазерной генерации), теории колебаний (автоколебания), так и некоторые химические процессы (например, колебательные реакции типа реакции Белоусова - Жаботинского). Кроме того, теория бифуркации применима для описания ряда явлений в экологии и динамике популяций, условий сосуществования видов (хищник - жертва), процессов эволюции и мутаций в биологии, взаимодействия и развития социальных систем и др.
Простейшим примером бифуркации является рассмотренное Л. Эйлером выпучивание в ту или иную сторону вертикально нагруженного стержня при превышении критической нагрузки (рис. 1). Теория бифуркации универсальна. Знание основных типов бифуркации позволяет существенно облегчить исследование реальных систем, предсказать характер новых движений, возникающих в момент перехода системы в качественно другое состояние, оценить их устойчивость и область существования.
Основы теории бифуркации заложены А. Пуанкаре и А. М. Ляпуновым в начале 20 века. Важнейший вклад в её развитие сделан А. А. Андроновым и Л. С. Понтрягиным, которые ввели понятие грубости (структурной устойчивости) динамических систем на плоскости. Грубые системы сохраняют качественную структуру разбиения фазового пространства на траектории при малых изменениях параметров. Нарушение условий грубости происходит при бифуркационных значениях параметров, когда система становится негрубой. Наиболее распространёнными типами поведения систем различного происхождения являются состояния равновесия и периодического движения. Математическим образом периодического движения является предельный цикл. Теория бифуркации для систем, обладающих состояниями равновесия и предельными циклами, разработана в основном А. А. Андроновым и его учениками.

Система находится в устойчивом состоянии (состоянии устойчивого равновесия), если при малом отклонении от него она возвращается вновь к этому состоянию (рис. 2а). В этом смысле такие положения равновесия словно притягивают к себе, поэтому они называются аттракторами (от английский attract - притягивать). Каждый аттрактор имеет свою область притяжения - множество начальных условий (координат и скоростей шарика, как на рисунке 2а), при отклонении от которых система с течением времени возвращается в это же состояние. Система находится в состоянии неустойчивого равновесия, если при малом отклонении от него она не возвращается в это состояние (рис. 2б).
Система, находящаяся в устойчивом стационарном состоянии, может испытывать бифуркацию, когда оно теряет устойчивость, например сливается с неустойчивым (рис. 3а-в). В этом случае с переходом параметра через бифуркационное значение (рис. 3б) система скачком переходит в другую область, удалённую от исходной (рис. 3в).

Бифуркация, при которой состояние устойчивого равновесия системы, наблюдаемое до перехода параметра через точку бифуркации, сменяется устойчивым периодическим движением, была исследована А. А. Андроновым и Э. Хопфом и носит их имя. Другой тип бифуркации Андронова - Хопфа - это жёсткое возбуждение, когда параметр системы изменяется так, что неустойчивый предельный цикл стягивается к стационарному устойчивому состоянию и в момент бифуркации сливается с ним. При этом область притяжения стационарного состояния системы и размеры предельного цикла уменьшаются до нуля, так что система теряет устойчивость и скачком переходит на другой режим движения.
Устойчивое периодическое движение также может претерпеть бифуркацию, либо слившись с неустойчивым периодическим движением, либо потеряв свою устойчивость. В последнем случае из периодических движений могут возникнуть периодические движения удвоенного периода или квазипериодические колебания (так называемый двумерный инвариантный тор). Квазипериодические колебания - это движения с двумя или более несоизмеримыми (рационально независимыми) частотами. Такие колебания наблюдаются, например, в системе двух связанных маятников с частотами ω 1 и ω 2 при ω 1 /ω 2 ≠ k/m, где k и m целые числа.
В нелинейных системах при изменении параметров допустима конечная (или даже бесконечная) последовательность бифуркаций, приводящая к появлению динамического хаоса (смотри также Странный аттрактор).
Лит.: Андронов А. А. и др. Теория бифуркаций динамических систем на плоскости. М., 1967; Арнольд В. И. и др. Теория бифуркаций // Современные проблемы математики. Фундаментальные направления. М., 1986. Т. 5; Лоскутов А.Ю., Михайлов А. С. Введение в синергетику. М., 1990.
Для изучения видов бифуркации желательно разобраться с самим . В общем случае исследование всего фазового пространства на точки бифуркации является сложной задачей для n-мерного пространства, поэтому проводятся локальные исследования, а полученные точки бифуркации называются локальными точками бифуркации . За локальными точками бифуркации можно проследить, наблюдая развитие малых возмущений в системе Бифуркации состояний равновесия и периодических движений на примере шарика. Простейшими и наиболее важными из них являются бифуркации состояний равновесия и периодических движений.
Бифуркация положений равновесия
К основным бифуркациям состояний равновесия относят:- слияние и последующее исчезновение двух состояний равновесия. Примером может служить движение шарика в потенциальной «яме» с «полочкой» (рис. 1). При сглаживании «полочки» BD состояние равновесия «седло» S и центр С 2 сливаются и исчезают (рис. 2).
 Рисунок 1 - Схема движения шарика в «яме» с «полочкой» (а) и его фазовый портрет (б)
Рисунок 1 - Схема движения шарика в «яме» с «полочкой» (а) и его фазовый портрет (б)
 Рисунок 2 - Схема движения шарика после бифуркации (а) и его фазовый портрет (б)
Рисунок 2 - Схема движения шарика после бифуркации (а) и его фазовый портрет (б)
- Рождение предельного цикла из состояния равновесия. Пример такой бифуркации бифуркация Хопфа .
 (1)
Динамическаия система
Она является упрощенным выражением сложной динамической системы, описываемой функциями x(t)
и y(t)
, которые выражаются через соответствующие полярные координаты:
и называется системой Хопфа.
Система (1) зависит от двух параметров, один из которых λ
будет для нас ключевым, а другой с=const
.
Решения задачи Коши при некоторых заданных начальных значения r(t=0)=r 0
, "phi;(t=0)="phi; 0
при λ < 0
дает нам фазовый портрет и график динамики, изображенные на рис. 3.
(1)
Динамическаия система
Она является упрощенным выражением сложной динамической системы, описываемой функциями x(t)
и y(t)
, которые выражаются через соответствующие полярные координаты:
и называется системой Хопфа.
Система (1) зависит от двух параметров, один из которых λ
будет для нас ключевым, а другой с=const
.
Решения задачи Коши при некоторых заданных начальных значения r(t=0)=r 0
, "phi;(t=0)="phi; 0
при λ < 0
дает нам фазовый портрет и график динамики, изображенные на рис. 3.
 Рисунок 3 - График динамики (а) и фазовый портрет (б)
В данном случае существует единственная особая точка - устойчивый фокус
.
Построим теперь график динамики и фазовый портрет для случая λ > 0 (λ = 4)
(см. рис. 4)
Рисунок 3 - График динамики (а) и фазовый портрет (б)
В данном случае существует единственная особая точка - устойчивый фокус
.
Построим теперь график динамики и фазовый портрет для случая λ > 0 (λ = 4)
(см. рис. 4)
 Рисунок 3 - График динамики (а) и фазовий портрет (б) при λ > 0
Разными цветами изображены развязки при различных начальных условиях. Как видим, после короткого переходного процесса система входит в колебательный режим, причем амплитуда и частота колебаний не зависят от начальных условий (при любых начальных условиях система придет в одно и то же колебательное состояние).
На фазовом портрете решение для разных начальных условий как бы «наматываются» на замкнутую кривую. Эта кривая, к которой при t -> ∞
стремятся решения задачи Коши, является аттрактором и называется предельным циклом
.
Колебательный процесс, описывающий этот предельный цикл, называется автоколебаниями
.
Развязки в виде автоколебаний возможны только в существенно нелинейных динамических системах.
Динамическая система Хопфа
имеет нелинейность в виде куба параметра, причем дополнительная нелинейность накладывается благодаря определению функций x(t)
и y(t)
как выражений тригонометрических функций.
Можно доказать, что для данной динамической системы амплитуда колебаний равна .
Итак, λ = 0
- бифуркационные значения параметра. В этой точке узел теряет устойчивость и вместо него рождается устойчивый предельный цикл.
Данная бифуркация рождения предельного цикла из неподвижной точки называется бифуркацией Хопфа
, а рождение автоколебаний - мягким (при малых изменениях параметра колебания имеют малую амплитуду, которая увеличивается с его ростом). Жесткое рождения автоколебаний - при малых изменениях параметра происходит «выброс» траектории в область притяжения другого аттрактора.
Рисунок 3 - График динамики (а) и фазовий портрет (б) при λ > 0
Разными цветами изображены развязки при различных начальных условиях. Как видим, после короткого переходного процесса система входит в колебательный режим, причем амплитуда и частота колебаний не зависят от начальных условий (при любых начальных условиях система придет в одно и то же колебательное состояние).
На фазовом портрете решение для разных начальных условий как бы «наматываются» на замкнутую кривую. Эта кривая, к которой при t -> ∞
стремятся решения задачи Коши, является аттрактором и называется предельным циклом
.
Колебательный процесс, описывающий этот предельный цикл, называется автоколебаниями
.
Развязки в виде автоколебаний возможны только в существенно нелинейных динамических системах.
Динамическая система Хопфа
имеет нелинейность в виде куба параметра, причем дополнительная нелинейность накладывается благодаря определению функций x(t)
и y(t)
как выражений тригонометрических функций.
Можно доказать, что для данной динамической системы амплитуда колебаний равна .
Итак, λ = 0
- бифуркационные значения параметра. В этой точке узел теряет устойчивость и вместо него рождается устойчивый предельный цикл.
Данная бифуркация рождения предельного цикла из неподвижной точки называется бифуркацией Хопфа
, а рождение автоколебаний - мягким (при малых изменениях параметра колебания имеют малую амплитуду, которая увеличивается с его ростом). Жесткое рождения автоколебаний - при малых изменениях параметра происходит «выброс» траектории в область притяжения другого аттрактора.
- Рождение из одного равновесного состояния трех состояний равновесия - спонтанное нарушение симметрии. Например, при движении шарика в желобе при условии появления в нем бугорка появляется бифуркация, при которой из вырожденного состояния типа «центр» возникают три состояния равновесия - седло S и центры С1 и С2 (рис. 4)
 Рисунок 4 - Рождения из одного состояния равновесия трех при малом изменении параметра (формы желоба):
а) форма желоба с одним минимумом и соответствующий фазовый портрет с одним состоянием равновесия типа «центр»;
б) форма желоба с двумя минимумами и соответствующий фазовый портрет с тремя состояниями равновесия: «седло» S и «центры» С1 и С2
Рисунок 4 - Рождения из одного состояния равновесия трех при малом изменении параметра (формы желоба):
а) форма желоба с одним минимумом и соответствующий фазовый портрет с одним состоянием равновесия типа «центр»;
б) форма желоба с двумя минимумами и соответствующий фазовый портрет с тремя состояниями равновесия: «седло» S и «центры» С1 и С2
Бифуркации рождения (гибели) периодического движения
Всем бифуркация рождения или гибели состояний равновесия соответствует прохождение одного или нескольких корней через ноль. Такая возможность проиллюстрирована на рис. 5, где изображена гибель двух состояний равновесия типа «седла» и «узла». Аналогичная бифуркация встречается в задачах о конкуренции видов Х1 и Х2, питающихся из одного источника. Соответствующая динамическая система, описывающая численность популяций, задается уравнениями: При ρ 1,2 > 1 в системе возможна «победа» одного из видов. При уменьшении любого из параметров ρ 1,2 до значения, меньшего от 1, при любых начальных условиях будет выживать только один вид (рис. 5, б).
При ρ 1,2 > 1 в системе возможна «победа» одного из видов. При уменьшении любого из параметров ρ 1,2 до значения, меньшего от 1, при любых начальных условиях будет выживать только один вид (рис. 5, б).
 Рисунок 5 - Фазовые портреты численности популяций, а) при ρ 1 < 1
, ρ 2 > 1
; б) при ρ 1,2 > 1
Рисунок 5 - Фазовые портреты численности популяций, а) при ρ 1 < 1
, ρ 2 > 1
; б) при ρ 1,2 > 1
Бифуркации смены устойчивости периодических движений
Весомая характеристика бифуркации устойчивости - значения мультипликаторов в критический момент, являющихся коэффициентами усиления (затухания) малых возмущений на фоне периодического движения за период Т. В автономной системе один из мультипликаторов всегда равен единице, поэтому в дальнейшем говорим о других. Если все мультипликаторы по модулю меньшие единицы, то начальное периодическое движение устойчиво. Бифуркации, связанные с исчезновением устойчивости, происходят при таких значениях параметров системы, при которых один или несколько из них равны по модулю 1.Теория бифуркаций проявляется повсеместно в естествознании. Дифференциальные уравнения, описывающие реальные физические системы, всегда содержат параметры, точные значения которых, не известны. Если уравнение, моделирующее физическую систему, оказывается структурно неустойчивым, то есть поведении его решении может качественно измениться при сколь угодно малом изменении правой части, то необходимо определить, какие бифуркации фазового портрета происходят при изменении параметров
Весьма важным и продуктивным понятием естествознания является понятие динамической системы. Под динамической системой понимают математическую модель того или иного реального процесса, обладающую следующими свойствами. Во-первых, должен быть известен некоторый набор величин, который однозначно задает состояние системы. Во-вторых, должен быть известен закон, по которому можно однозначно определить состояние системы в любой момент времени, если известно ее начальное состояние. Это понятие является очень широким и поэтому примеры динамических систем можно найти практически во всех областях физики, биологии, химии и т.д.
Поведение динамической системы, в частности, установившиеся с течением времени режимы, могут зависеть от некоторых параметров. Оказывается, что при медленном изменении параметра могут происходить качественные перестройки установившихся режимов. Изучение таких перестроек при вариации параметров в динамических системах (причем, не только в отображениях, но и в дифференциальных уравнениях) составляет предмет теории бифуркаций. Она выявляет типичные бифуркации, изучает и классифицирует их. Теория бифуркаций является математической наукой.
Слово «бифуркация» означает «раздвоение» и употребляет как название любого скачкообразного изменения, происходящего при плавном изменении параметров в любо системе: динамической, экологической и т. д. Статья посвящена бифуркациям нелинейных динамических систем.
Часто при моделировании физических процессов часть переменных, изменения которых незначительны в рамках моделируемых процессов, принимают константами. В результате получается система более низкого порядка, чем исходная, но учесть влияние изменения членов, принятых за постоянные, становится невозможно. В этом случае члены можно рассматривать, как возмущения и описывать модель средствами теории бифуркаций.
Бифуркации допускают определенную классификацию. Во-первых, по минимальной величине размерности системы, для которой возможна данная бифуркация. А, во-вторых, по минимальному количеству параметров, необходимых для данного типа перестройки.
1. Понятие бифуркации
Бифуркации имеют фундаментальное значение при исследовании поведения динамических систем. Часто именно бифуркации определяют механизм возникновения многих сложных процессов. Остановимся на некоторых основных положениях теории бифуркации.
Пусть нелинейная модель автономной системы, представленная ДУ
\begin{equation} {dx \over dt} = F(x,\lambda) \end{equation}
характеризуется изменением параметра \(\lambda\). В реальной системе таким параметром может быть температура, давление, концентрация, коэффициент роста популяции и т. д. Следует подчеркнуть, что изучению подлежит не конкретная модель с фиксированным параметром, а семейство динамических моделей, поведение которых зависит от \(\lambda\).
При некотором значении параметра, называемым критическим значением, процессы в системе претерпевают качественное изменение. В этом случае структура (топология) разбиения фазового пространства (фазовой плоскости при размерности 2) на траектории также качественно изменяется. Такое свойство нелинейной системы принято называть бифуркацией (от латинского слова bifurcus – раздвоенный), а варьируемый параметр \(\lambda\), при котором наблюдается бифуркация – бифуркационным параметром.
Более строго, бифуркационным (критическим) значением параметра \(\lambda\) называется такое его значение, при котором динамическая система становится негрубой (структурно-неустойчивой).
Понятие грубости динамической системы было введено А.А. Андроновым и Л.С. Понтрягиным. Динамическая система, представленная ДУ следующего вида
\[{dx_i \over dt} = F(x), x = 1, …, n \]
называется грубой в области \(G \subset {{\bf{R}}^n}\), если для любого \(\varepsilon > 0\) можно указать такое \(\delta > 0\), что при произвольных аналитических функциях \({Q_i}({x_1},\; \ldots ,\;{x_n}) = {Q_i}({\bf{x}})\) изменённой (другими словами – возмущённой) системы
\[\frac{{d{x_i}}}{{dt}} = {F_i}({\bf{x}}) + {Q_i}({\bf{x}}),i = 1,\; \ldots ,\;n\]
удовлетворяющих неравенству
\[\sum\limits_{i = 1}^n {\left[ {\left| {{Q_i}({\bf{x}})} \right| + \sum\limits_{j = 1}^n {\left| {\frac{{\partial {Q_i}({\bf{x}})}}{{\partial {x_j}}}} \right|} } \right] < \delta } \]
существует такое взаимно однозначное и взаимно непрерывное отображение области в себя, при котором каждая траектория исходной (невозмущённой) системы отображается в соответствующую траекторию системы и обратно. При этом соответствующие друг другу точки находятся на расстоянии, меньшем \(\varepsilon \). Другими словами, грубыми являются такие динамические системы, у которых качественная структура фазовых траекторий не меняется при произвольном малом изменении правых частей исходного ДУ.
Для грубых динамических систем второго порядка выполняются следующие условия:
- в области \(G \subset {{\bf{R}}^2} \)могут располагаться только простые особые точки (состояния равновесия) типа «узел», «фокус», «седло», т. е. такие, для которых действительные части корней характеристического уравнения линеаризованной системы отличны от нуля. Такие особые точки (их конечное число) называются грубыми;
- в области \(G\) могут располагаться только простые предельные циклы, число которых конечно;
- в области \(G\) отсутствуют сепаратрисы, идущие из седла в седло. Возможно существование сепаратрис сёдел, в одну сторону стремящиеся к узлу, фокусу, предельному циклу или при некотором значении \(t\) выходящие из области \(G\).
При нарушении этих условий динамическая система становится негрубой.
В соответствии с теорией бифуркаций в пространстве координат и параметра из точки бифуркации могут исходить несколько ветвей решения уравнения равновесия
\[{\bf{0}} = {\bf{F}}({\bf{x}},\;\lambda)\]
как устойчивых, так и неустойчивых. Графики зависимости координат положений равновесия от \(\lambda\) представляют собой бифуркационные диаграммы.
Простейшим примером бифуркации может служить следующая система
\[\frac{{dx}}{{dt}} = \lambda x\]
которая имеет решение \(x(t) = {x_0}{e^{\lambda t}}\), определяющее экспоненциальный рост (убывание), если \(\lambda > 0(\lambda < 0)\) соответственно. Заметим, что приведенное выше уравнение определяет динамику цепной реакции \(\lambda > 0\) и распада ядра \(\lambda < 0\). Единственное состояние равновесия уравнения \(x = 0\) устойчиво при \(\lambda < 0\) и неустойчиво при \(\lambda > 0\).
Рис. 1.1 - Временная характеристика системы при различных значениях бифуркационного параметра
2. Классификация
Бифуркации принято классифицировать по числу нарушений условий гиперболичности собственных значений матрицы
\[{\bf{J}}({\bf{x}},\;{\lambda _1},\; \ldots ,\;{\lambda _m}) = \left\| {\frac{{\partial {F_i}({\bf{x}},\;{\lambda _1},\; \ldots ,\;{\lambda _m})}}{{\partial {x_j}}}} \right\|\]
Неподвижная точка называется гиперболической, если матрица Якоби \({\bf{J}}\), определённая в ней, не содержит собственных значений \({s_k} \) с нулевой действительной частью, т. е. \({\rm{Re}}\,{s_k} \ne 0\).
При рассмотрении многопараметрического пространства \(\Lambda \) точка этого пространства (\(\lambda \in \Lambda \)), в которой происходит качественное изменение поведения динамической системы, именуется точкой бифуркации. Для пространства \(\Lambda \) характерна задача определения числа параметров \(\{ {\lambda _q}\} \), которые должны присутствовать в модели для того, чтобы данная бифуркация относилась к типичной.
Собственные значения \({s_k} \) матрицы \({\bf{J}}\) представляют собой функции от параметров, т. е. \({s_k}({\lambda _1},\; \ldots ,\;{\lambda _m})\). Тогда условия нарушения гиперболичности вида \({\rm{Re}}\,{s_k} = 0\) определяются системой уравнений, составленных относительно параметров. Например, для того, чтобы два действительных собственных значения одновременно обратились в ноль, необходимо найти решение системы двух уравнений относительно неизвестных
\[\begin{array}{l}
{s_1}({\lambda _1},\; \ldots ,\;{\lambda _m}) = 0\\
{s_2}({\lambda _1},\; \ldots ,\;{\lambda _m}) = 0
\end{array}\]
При этом возможны следующие типичные ситуации:
- если \(m = 1 \) , то решение в общем случае отсутствует; бифуркация не обнаруживается;
- если \(m = 2 \), то возможно решение; бифуркация может произойти в одной или нескольких точках \(\Lambda \);
- если \(m > 2 \), то в типичных случаях негиперболические точки будут располагаться на поверхности размерности \(m — 2 \) в \(\Lambda \) , т. е. могут образовываться поверхности бифуркации.
В общем случае, если необходимо удовлетворить \(k \) условиям нарушения гиперболичности, то возможные точки бифуркации будут располагаться на \((m — k)\) -мерной поверхности. Величину \(k \), определяющую количество условий нарушения гиперболичности, называют коразмерностью бифуркации. Разность между размерностью пространства и размерностью поверхности бифуркации представляет собой коразмерность поверхности.
Коразмерность бифуркации показывает, каким числом параметров должна определяться динамическая система, чтобы наблюдаемая в ней бифуркация была типичная. Другими словами, коразмерность бифуркации – наименьшая размерность пространства \(\Lambda \), в котором возможна бифуркация соответствующего типа. В дальнейшем для простоты понимания основных положений теории бифуркаций целесообразно ограничиться рассмотрением бифуркаций коразмерности 1, которые наблюдаются в однопараметрических системах. С бифуркациями более высокого порядка можно ознакомиться в специальной литературе.
Изучение распространённых типов бифуркаций производится на моделях первого и второго порядков, представленных определёнными ДУ. При этом в линеаризованных моделях возникает одно нулевое или два мнимых собственных значений матрицы Якоби.
2.1 Бифуркации в системах с простым движением
Негрубость системы означает негрубость тех или иных траекторий. Среди таких траекторий прежде всего выделяются устойчивые состояния равновесия и периодические движения, поскольку они являются математическим образом стационарных состояний и автоколебаний.
Состояние равновесия n-мерной системы \(\mathop x\limits^. = X(x)\) точка \(M({x^*})\), где \({x^*}\) — решение системы \(X(x) = 0\). Оно негрубое, если среди \({\lambda _{1,}}{\lambda _2}, …{\lambda _n}\) — корней характеристического уравнения \(\det (\frac{{\partial X({x^*})}}{{\partial x}} — \lambda E) = 0\) имеются корни, лежащие на мнимой оси. В случае, если \({\mathop{\rm Re}\nolimits} {\lambda _i} < 0,i = 1,…n \), состояние равновесия является устойчивым. Если имеются корни как с отрицательной, так и с положительной реальной частью, то состояние равновесия носит название седлового. К нему будут стремиться траектории как при \(t \to + \infty \), так и при \(t \to — \infty \) , в совокупности образуя устойчивое \({W^s}\) и неустойчивое \({W^u}\) многообразия. Периодическое решение \(x = \phi (t) \) этой системы будет негрубым, если среди мультипликаторов \({\rho _1},{\rho _2},…{\rho _{n — 1}}\) имеются равные по модулю 1. Если же \(\left| {{\rho _i}} \right| < 1\), периодическое движение устойчивое, и седловое, если среди мультипликаторов есть как лежащие внутри единичного круга, так и вне его.
В настоящее время основные (коразмерности 1) локальные и глобальные бифуркации таких траекторий подробно изучены.
Устойчивое состояние равновесия может:
- исчезнуть, слившись с неустойчивым. В момент бифуркации у состояния равновесия, называемого седло-узел, только один характеристический корень лежит на мнимой оси и равен нулю.
- потерять устойчивость. При этом из состояния равновесия будет рождаться (влипать в него) устойчивое (неустойчивое) периодическое движение, если в момент бифуркации состояние равновесия устойчиво (неустойчиво). Эта бифуркация, объясняющая генерацию колебаний, носит название Андронова-Хопфа.
Устойчивое периодическое движение может:
- исчезнуть, слившись с неустойчивым в момент бифуркации. Для \(n > 2\) негрубое периодическое движение носит название седло-узлового.
- потерять устойчивость с рождением устойчивого
- периодического движения удвоенного периода, если мультипликатор равен (-1),
- двумерного инвариантного тора, если \({\rho _{1,2}} = {e^{ \pm i\phi }}\), где \(\phi \ne 0,\pi ,\frac{\pi }{2},\frac{{2\pi }}{3}\).
Устойчивые периодические движения могут также рождаться в результате следующих глобальных бифуркаций:
- из траектории, идущей из седла с характеристическими корнями \({\mathop{\rm Re}\nolimits} {\lambda _i} < 0\), \(i=1, … ,n-1\), и седловой величиной \(\max {\mathop{\rm Re}\nolimits} {\lambda _i} + {\lambda _n} < 0\) в то же седло,
- из траектории, идущей из седло-узла в него при исчезновении состояния равновесия,
- при исчезновении седло-узлового периодического движения, все траектории неустойчивого многообразия которого, образуют в совокупности сильно сжимающуюся трубку, навивающуюся на периодическое движение. Эта бифуркация называется «катастрофой голубого неба» и ее особенность состоит в том, что при стремлении параметра к бифуркационному значению длина периодических движений стремится к бесконечности.
В случае коразмерности 1 седловые периодические движения могут рождаться из траектории, идущей 1) из седла в него же, 2) из негрубого состояния равновесия типа седло-седло в него же при его исчезновении (такое состояние равновесия образуется при слиянии двух грубых седел.)
Все перечисленные бифуркации не выводят из класса систем с простым поведением траекторий.
2.2 Бифуркации в системах со сложным движением
Основным признаком системы со сложным поведением траекторий является существование грубого предельного множества, состоящего из траекторий седлового типа, в котором всюду плотны постоянные движения и есть всюду плотная траектория. Такие множества называются гиперболическими. Наиболее универсальный критерий существования таких множеств связан с гомоклинической орбитой Пуанкаре - двояко асимптотической траекторией к седловому постоянному движению, по которой его устойчивое и неустойчивое многообразия пересекаются без касания. Наличие такой структуры гарантирует существование в любой ее малой окрестности одномерного гиперболического множества, но неустойчивого. По этой причине бифуркации, связанные с появлением или исчезновением гиперболического множества, получили общее название гомоклинических. Другим типичным случаем систем со сложным поведением траекторий являются системы с гомоклиническими петлями седло-фокуса с положительной седловой величиной. Гомоклинические бифуркации подразделяются на два типа: граничные, объясняющие переходы от простой динамики к сложной, и внутренние. Характерным примером бифуркации 1-го типа, показывающим, что системы с простой и сложной динамикой могут быть разделены бифуркационной поверхностью, является бифуркацией исчезновения состояния равновесия типа седло-седло с не менее, чем двумя двояко асимптотическими траекториями, а также ряд бифуркаций систем с негрубой гомоклинической траекторией Пуанкаре. Однако такому переходу может предшествовать бесконечный каскад бифуркаций удвоения периода Шарковского-Фейгенбаума. Отметим также задачу о разрушении тора в связи с проблемой синхронизации.
В случае внутренних бифуркаций одной из основных задач является выделение в пространстве динамических систем областей негрубых систем. Впервые на это необычное явление было указано Смейлом в начале 60-х годов. Но наибольшую известность получили области Ньюхауса, в которых всюду плотны системы с негрубыми гомоклиническими траекториями Пуанкаре, имеющие постоянного движения любого порядка вырождения. Из этого следует вывод - для нелинейной динамики: полный качественный анализ моделей, допускающих негрубую гомоклиническую траекторию Пуанкаре, не реалистичен.
С открытием динамического хаоса в теории бифуркаций открылась новая глава, связанная с теорией странных аттракторов – притягивающих предельных множеств с неустойчивым поведением траекторий. В отличие, например, от постоянных движений, странные аттракторы не имеют унифицированной природы: они могут быть как многообразием (гладким или негладким), так и множествами с весьма сложной теоретико-множественной структурой. Исходя из интересов нелинейной динамики, от странных аттракторов требуется, чтобы они сохраняли свои свойства при малых возмущениях системы. Естественно, это так для гиперболических аттракторов. Но анализ ряда моделей показал, что таковыми могут быть и негрубые аттракторы. Характерным примером является странный аттрактор модели Лоренца \(\mathop x\limits^. = — \sigma (x — y),\mathop y\limits^. = — y + rx — xz,\mathop z\limits^. = — bz + xy\), негрубость которого обусловлена тем, что состояние равновесия типа седло принадлежит странному аттрактору. В размерности n>3 могут быть негрубые аттракторы, содержащие седло-фокус. Поскольку последние допускают гомоклинические касания, их (по выше приведенным причинам) принято называть «дикими». Понятно, что изучение бифуркаций, приводящих к возникновению странных аттракторов, стало одной из актуальных задач. Исторически эта проблема возникла в гидродинамике в связи с объяснением возникновения турбулентности. Именно в этой связи в 40-х годах Ландау и Хопф предложили такое объяснение на примере каскада бифуркаций торов с повышением их размерности. Гидродинамическое происхождение имеет и модель Лоренца. Здесь переход от простой динамики к странному аттрактору происходит в результате двух гомоклинических бифуркаций: граничной бифуркации гомоклинической восьмерки-бабочки седла, в результате которой рождается неустойчивое одномерное гиперболическое множество, и внутренней бифуркацией гомоклинического контура в момент, когда обе траектории, выходящие из седла, впервые устремятся к седловым постоянным движением, появившимся в результате граничной бифуркации. Однако такой, сравнительно простой сценарий, обусловлен тем, что модель Лоренца обладает симметрией \((— x, — y) \to (x,y)\). Отметим также следующий результат, имеющий пока чисто математическое значение, — ряд гиперболических аттракторов (соленоид Смейла-Вильямса, аносовский тор), могут рождаться в результате глобальных бифуркаций, связанных с исчезновением седло-узловых постоянных движенй и торов. Помимо странных аттракторов во многих прикладных исследованиях встречаются предельные множества, которые можно назвать квазиаттракторами, поскольку в них, кроме гиперболических множеств, содержатся устойчивые постоянные движения, причем даже в счетном множестве. Подобная ситуация возникает, например, в трехмерных системах с отрицательной дивергенцией. В компьютерных исследованиях динамика модели в областях Ньюхауса может вполне ассоциироваться с хаотическим поведением траекторий, поскольку п.д. могут иметь весьма большие периоды и узкие области притяжения.
3. Мягкая и жесткая потеря устойчивости
3.1 Понятие мягкой и жесткой потери устойчивости
Бифуркации условно можно разделить на мягкие и жёсткие, что наглядно демонстрируется следующим примером. На рис. 3.1 и рис. 3.2 изображён перестраиваемый профиль с шариком. В результате изменения какого-либо фактора (параметра), исходный профиль изменяет свою конфигурацию таким образом, что устойчивое равновесное состояние шарика теряется. При этом «рождаются» два новых устойчивых состояния равновесия, в один из которых и сваливается шарик. Вновь появившиеся состояния равновесия перестроившегося профиля располагаются в непосредственной близости от начального состояния равновесия, которое потеряло устойчивость. Бифуркации такого типа называют мягкими. Новый режим функционирования как бы постепенно появляется из режима, потерявшего устойчивость, и сосуществует рядом с ним.

Рис. 3.1 - перестраиваемый профиль с шариком
Характер перестроения профиля, изображённого на рис. 3.2, иной. Для значения параметра меньше критического шарик находится в устойчивом равновесном состоянии. Одновременно существует ещё одно потенциальное неустойчивое равновесное состояние. При перестроении профиля для критического значения параметра устойчивое и неустойчивое состояния сливаются в одно. Далее они оба исчезают, и система «скачком» выбирает новый режим, который существенно отличается от предыдущего и не находится в непосредственной близости от исходного режима. Бифуркации такого типа относятся к жёстким. Именно жёсткие (скачкообразные) бифуркации в первую очередь являются предметом исследования теории катастроф.

Рис. 3.2 - перестраиваемый профиль с шариком
4. Виды бифуркаций
В следующем разделе будут описаны основные виды и примеры бифуркаций как непрерывных, так и дискретных (отражений) функций.
4.1 Касательная (седло-узловая) бифуркация
Пример седло-узловой бифуркации рассмотрим на примере системы, описываемой д.у.:
\[\frac{{dx}}{{dt}} = \lambda — {x^2}\]
где \(\lambda \) - варьируемый параметр. Равновесные решения \(x_{{\rm{1}}{\rm{,2}}}^{\rm{}} = \pm \sqrt \lambda \) уравнения определены только для \(\lambda \ge 0\); при \(\lambda < 0\) равновесные состояния отсутствуют. Значение \(\lambda = 0\) является бифуркационным. На рис. 4.2 изображена соответствующая бифуркационная диаграмма. Как видно из рисунка, из точки бифуркации \((x = 0,\;\lambda = 0)\) выходят две ветви равновесных состояний, одна из которых устойчивая, а вторая - неустойчивая. При варьировании параметра в сторону увеличения значений из «ничего» рождаются два состояния равновесия, одно из которых устойчиво. Бифуркации такого рода относят к типу «седло-узел».
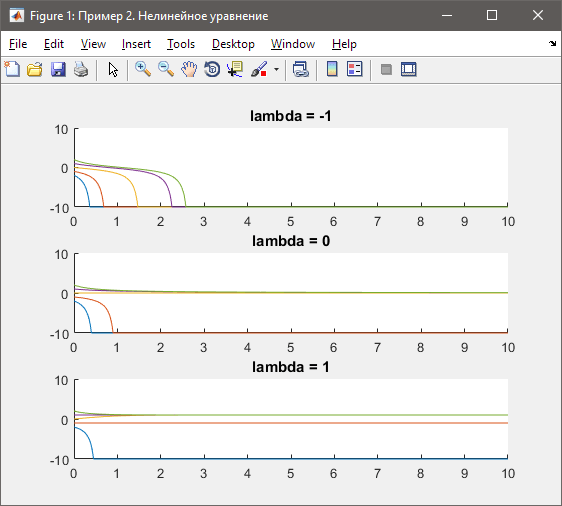
Рис. 4.1 - Временная характеристика системы с касательной (седло-узловой) бифуркацией

Рис 4.2 - Диаграмма касательной (седло-узловой) бифуркации
4.2 Транскритическая бифуркация (бифуркация типа «обмен устойчивости»)
Бифуркацию типа «обмен устойчивости» продемонстрируем на системе
\[\frac{{dx}}{{dt}} = x\lambda — {x^2}\]
Уравнение имеет два равновесных решения: \(x_1^{\rm{}} = 0,\;x_2^{\rm{}} = \lambda \). Первое решение устойчиво при и неустойчиво при; второе – устойчиво при \(\lambda < 0\) и неустойчиво при \(\lambda > 0\). Принято говорить, что оба решения «обмениваются устойчивостью» в точке бифуркации \((x = 0,\;\lambda = 0)\). На рис. 4.3, представлены соответствующие графики функций.

Рис. 4.3 - Временная характеристика системы с транскритической бифуркацией

Рис. 4.4 - Диаграмма транскритической бифуркации
4.3 Бифуркация «вилка»
Бифуркация типа «вилка» описывается ДУ вида
\[\frac{{dx}}{{dt}} = \lambda x — {x^3}\]
Это уравнение имеет одно равновесное решение \(x_1^{\rm{}} = 0 \) при \(\lambda < 0\) и три равновесных решения \(x_1^{\rm{}} = 0,\;x_{{\rm{2}}{\rm{,3}}}^{\rm{}} = \pm \sqrt \lambda \) при \(\lambda > 0\). Соответствующие графики функций (рис. 4.6) симметричны относительно оси \(x\). В данном случае из точки бифуркации выходят три ветви равновесных состояний: две устойчивые и одна неустойчивая.

Рис. 4.5 - Временная характеристика системы с бифуркацией «Вилка»

Рис. 4.4 - Диаграмма бифуркации «Вилка»
Бифуркация типа «вилка» широко рассматривается в теоретической физике, поскольку на ней основываются некоторые теории, объясняющие спонтанное нарушение симметрии (устойчивая равновесная точка \(x_1^{\rm{}} = 0 \) при \(\lambda < 0\) отвечает симметричному состоянию, например, отсутствию намагниченности, а рождающиеся устойчивые точки равновесия \({x^{\rm{}}} = \pm \sqrt \lambda \) при \(\lambda > 0\) – состоянию с нарушенной симметрией). В частности, на этой бифуркации основана теория переходов II рода, предложенная Л. Д. Ландау. В ней чаще всего роль параметра \(\lambda\) играет отклонение температуры от критического значения, а величина \(x\) носит название «параметр порядка».
Рассмотренные бифуркации называются суперкритическими или нормальными. Их особенность заключается в том, что нелинейные члены \({x^2}\) и \({x^3}\) соответствующих уравнений оказывают влияние, способствующее получению устойчивых равновесных состояний системы. Однако при изменении знаков перед нелинейными членами, последние будут оказывать уже дестабилизирующее влияние на систему. В этих случаях возникают субкритические или обратные бифуркации.
4.4 Бифуркация Андронова – Хопфа (Hopf)
Кроме бифуркаций состояний равновесия в динамических системах при изменении параметра может происходить ещё одна перестройка структуры фазового портрета. Этот тип бифуркации рассматривает рождение предельного цикла из неподвижной точки и является более сложным, чем представленные выше.
Пусть нелинейная модель описывается следующим д. у.:
\[\frac{{dz}}{{dt}} = (\mu + j\eta)z — z{\left| z \right|^2}\]
где \(z \) – комплексная переменная; \(\mu + j\eta \) – комплексный параметр, причём \(j \) – мнимая единица, \(\mu \) – варьируемый бифуркационный параметр.
Уравнение представляет собой комплексный аналог бифуркации типа «вилка». С целью определения всех равновесных решений необходимо произвести замену комплексной переменной \(z \):
где \({x_1}\) и \({x_2}\) новые вещественные переменные.
В результате подстановки \(z \) в исходное ДУ получается система из двух уравнений первого порядка:
\[\begin{array}{l}
{{\dot x}_1} = [\mu — (x_1^2 + x_2^2)]{x_1} — \eta {x_2}\\
{{\dot x}_2} = [\mu — (x_1^2 + x_2^2)]{x_2} + \eta {x_1}
\end{array}\]
Таким образом, здесь осуществлён переход к модели второго порядка с вещественными параметрами. Полученные уравнения связаны между собой через комплексную переменную \(z \) и имеют следующие два стационарных решения:
\[{x_1} = {x_2} = 0 \ при \ z = 0 \\
x_1^2 + x_2^2 = {\left| z \right|^2} = \mu \ при \ z \ne 0\]
Первое решение является неустойчивым и совпадает с точкой бифуркации, а второе решение определяет окружность радиуса \(\sqrt \mu\) в пространстве координат \(({x_1},\;{x_2},\;\mu)\). На рис. 4.5 изображены фазовые траектории при фиксированных \(\mu \).
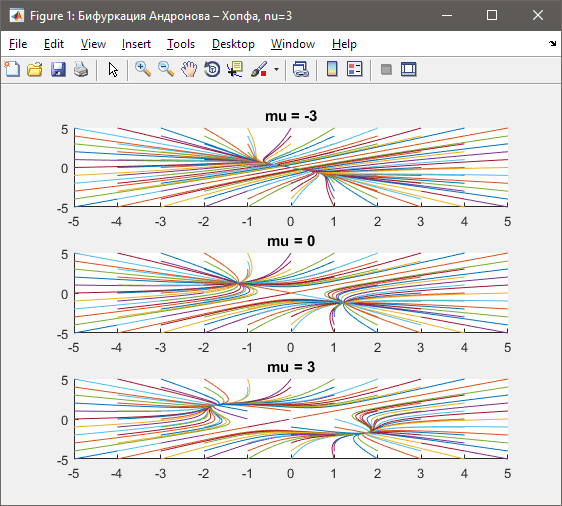
Рис. 4.5 - Фазовый портрет системы с бифуркацией Андронова – Хопфа
4.5 Бифуркации циклов
Образование в динамических системах второго порядка предельных циклов – соответствует бифуркации Андронова–Хопфа. Так, для модели, представленной системой ДУ
\[\begin{array}{l}
\frac{{d{x_1}}}{{dt}} = {x_2} — {x_1}(x_1^2 + x_2^2 — \lambda)\\
\frac{{d{x_2}}}{{dt}} = — {x_1} — {x_2}(x_1^2 + x_2^2 — \lambda)
\end{array}\]
точка \(\lambda = 0\) является бифуркационной точкой. При изменении \(\lambda \) с отрицательных значений на положительные от нулевого равновесного состояния \(({x_1} = 0,{x_2} = 0)\) ответвляется периодическая орбита \(x_1^2 + x_2^2 = \lambda \), соответствующая устойчивому предельному циклу. При этом происходит изменение характера особой точки: из устойчивой она становится неустойчивой (рис. 4.6).

Рис. 4.6 - Фазовый портрет системы с бифуркацией циклов
4.6 Бифуркация удвоения периода
Теперь рассмотрим бифуркации отражений. Одномерное отображение – это простейшая модель эволюционного процесса, когда состояние системы характеризуется единственной переменной, а время – дискретно. Примером может служить динамика численности биологической популяции, если наблюдение за ее численностью производится, например, один раз в год.
Простейшей моделью, описывающей бифуркацию удвоения периода, может служить логистическое отображение
\[{x_{n + 1}} = 1 — \lambda x_n^2\]
Его неподвижные точки ищутся из решения соответствующего квадратного уравнения #\({x_0} = 1 — \lambda x_0^2\), так что
\[{x_0} = \frac{{ — 1 \pm \sqrt {1 + 4\lambda } }}{{2\lambda }}\]
При \(\lambda = -0.25\) имеет место касательная бифуркация, в результате которой возникают неустойчивая и устойчивая точки.
Построим бифуркационную диаграмму (Рис. 4.7) с помощью команды математического пакета Maxima.
Катастрофой называется скачкообразное изменение, возникающее в виде внезапного ответа системы на плавное изменение внешних условий. Математическое описание явлений, связанных с резкими скачками и качественными изменениями картины процесса, дается теориями особенностей и бифуркаций; бифуркации (катастрофы) представляют собой разрывы в системах, описываемых гладкими (непрерывными) функциями. Теория катастроф французского математика Р. Тома (R.Thom) - топологическая формализация, математический язык которой сложен даже для математиков. Теории особенностей, бифуркаций и катастроф наилучшим образом изложены в доступной для понимания биолога и небольшой по числу страниц книге «Теория катастроф» нашего соотечественника В.И. Арнольда, одного из лучших математиков мира. Эти теории описывают возникновение дискретных структур из непрерывных, называемых математиками гладкими.
Итак, источники теории катастроф – теория бифуркаций динамических систем великих математиков А. Пуанкаре (H. Poincare) и А.А. Андронова и топологическая теория особенностей гладких отображений Х. Уитни (H. Whitney). Некоторое представление об топологических особенностях может дать изображение так называемой каустики (от греч. «жгущий»), возникающей при отражении от окружности пучка параллельных лучей (рис. 1) – к примеру, в чашке с жидкостью.
Рис. 1. Каустика при отражении от окружности пучка лучей (Брус, Джиблин, 1988)
Топологическая особенность, называемая сборкой, она же бифуркация, элементарная катастрофа, схематически показана на рис. 2.
Рис. 2. Топологическая особенность (сборка) и ее проекция на плоскость (Брус, Джиблин, 1988)
Термин «бифуркация» (раздвоение, образование вилки) употребляется, как и «катастрофа», для обозначения качественных перестроек различных систем

при изменении параметров. Обычный пример катастрофы, бифуркации представляет собой поведение какой-либо упругой конструкции, под воздействием увеличивающейся нагрузки внезапно, скачкообразно переходящей в другое положение (рис. 3), причем направление выгиба конструкции предсказать невозможно.
Рис. 3. Прогиб колонны при превышении критической нагрузки (Малинецкий, 1997)
Графически бифуркация изображена на рис. 4: система имеет одно решение, одно значение в каждой точке - до точки бифуркации, после чего появляется выбор между двумя возможными решениями.
Рис. 4. Графическое представление бифуркации (катастрофы)

В самых разнообразных системах при изменении значения «управляющей» переменной система уходит от равновесия, достигая порога устойчивости. Это критическое значение называется точкой бифуркации; в точке бифуркации у системы появляется «выбор», в котором неизбежно присутствует элемент случайности с невозможностью предсказать выбор траектории эволюции системы.. Последовательность бифуркаций во времени описывает морфологию поведения системы (рис. 5).
Рис. 5. Примеры последовательностей бифуркаций (Малинецкий, 1997)
Теория катастроф указывает некоторые общие черты явлений скачкообразного изменения режима разнообразных систем в ответ на плавное изменение внешних условий: сочетание случайности и необходимости, детерминизма и непредсказуемости, возможность выбора из нескольких решений вблизи точки бифуркации, неожиданно сильного отклика на слабое воздействие (и наоборот).
В 70-х годах теорию катастроф стали применять к широкому спектру явлений с дискретным, скачкообразным поведением, когда кажущаяся
Сложные динамические системы включают флуктуирующие, случайным образом изменяющиеся компоненты. Отдельные флуктуации или их сочетания в системе с обратной связью, усиливаясь, вызывают разрушение прежнего состояния системы. Случайные воздействия в момент перелома (в точке бифуркации) могут подтолкнуть систему на новый путь развития; после же выбора одного из возможных путей, траектории развития, действует однозначный детерминизм - развитие системы предсказуемо до следующей точки бифуркации. Так случайность и необходимость дополняют друг друга.
В неравновесных условиях вблизи точки бифуркации система очень чувствительна к внешним воздействиям, и малое по силе внешнее воздействие, слабый сигнал может вызвать значительный отклик, неожиданный эффект. Внешние физические поля могут восприниматься системой, влияя на ее морфогенез. Так, при образовании ячеек Бенара (см. ниже) существенную роль начинает играть гравитация. Есть и биологические аналогии: роль гравитации в становлении дорсо-вентральной полярности при оплодотворении яйцеклетки амфибий, поляризация зиготы фукоидных водорослей под воздействием градиента освещенности.
Итак, в далеком от равновесия состоянии системы на первый план выступают нелинейные соотношения, слабое внешнее воздействие может порождать неожиданное, непредсказуемое поведение системы в целом. Иногда в состояниях, далеких от равновесия, очень слабые флуктуации или внешние возмущения могут усиливаться до огромных, скачкообразным образом разрушающих всю прежнюю структуру системы и переводящих ее в иное состояние.
К теории катастроф по сути близка идея самоорганизованной критичности (П. Бак и К. Чен, 1991), согласно которой системы с большим числом
взаимодействующих элементов спонтанно эволюционируют к критическому состоянию, когда малое воздействие может привести к катастрофе. Сложные системы могут разрушиться не только от мощного удара, но и от малого события, запускающего цепную реакцию, каскад бифуркаций, разрушительный турбулентный режим. К сложным системам относятся многие природные (земная кора, экосистемы) и социальные системы; примеры природных катастроф – землетрясения, лавины, социальных – крушение империй, обвал рынков. Экспериментальная модель Бака и Чена (Bak, Chen) – конические кучи сухого песка. Падение единственной песчинки на песчаный конус, находящийся в критическом состоянии, может вызвать обвал, катастрофу. В критическом состоянии падение отдельных скатывающихся песчинок, фиксируемое в эксперименте как «шум мерцания», оказывается предвестником катастрофы; можно выявить подобные предвестники природных и социальных катастроф. Кучи песка, по словам авторов, это не просто экспериментальная модель, это новый взгляд на мир, метафора кооперативного поведения многих частиц, неустойчивого равновесия, непредсказуемости. Это холистическая концепция: глобальные характеристики и эволюцию системы нельзя понять, анализируя составляющие ее части.
Вхождение системы в непредсказуемый режим, переход к хаосу, описывается каскадом бифуркаций, следующих одна за другой (рис. 6). Каскад бифуркаций ведет последовательно к появлению выбора между двумя решениями, затем четырьмя и т.д.; система начинает колебаться в хаотическом, турбулентном режиме последовательного удвоения возможных значений.
Теория бифуркаций и катастроф неразрывно связана с современными представлениями о динамическом, или детерминированном, хаосе.

Рис. 6. Сценарий удвоения периода; на вставке показана выделенная часть (Пайтген, Рихтер, 1993)